Clemson University International Center for Automotive Research
- Active Anti-Roll Stabilization: Controller Development Incorporating Road Preview
- Optimization of Vehicle models to reduce the computational requirement
- Powertrain Concept for year 2020
- Android OBD gaming and NFC smart key
Active Anti-Roll Stabilization: Controller Development Incorporating Road Preview
The goal of the project is to improve stability and performance using active roll control
Control Strategy

Control Strategy
Feed Forward Control
- Calculation for Neutral Steer Yaw rate (\(K_{us}=0\) or \(\frac{r}{\delta}=\frac{V}{L}\))
Neutral steer Yaw rate is used in Yaw Rate Distribution block to optimize vehicle balance - Bicycle model feedforward control parameter
Road Preview
- Interpolate the path deviation from CarSim at intervals of 5, 10, 15, 20, and 25m to calculate the look-ahead path deviation for a 1 second preview
Roll Rate Control
- Roll damping parameter using roll rate as input signal
Roll Angle Control
- Roll angle parameter using lateral acceleration as input signal
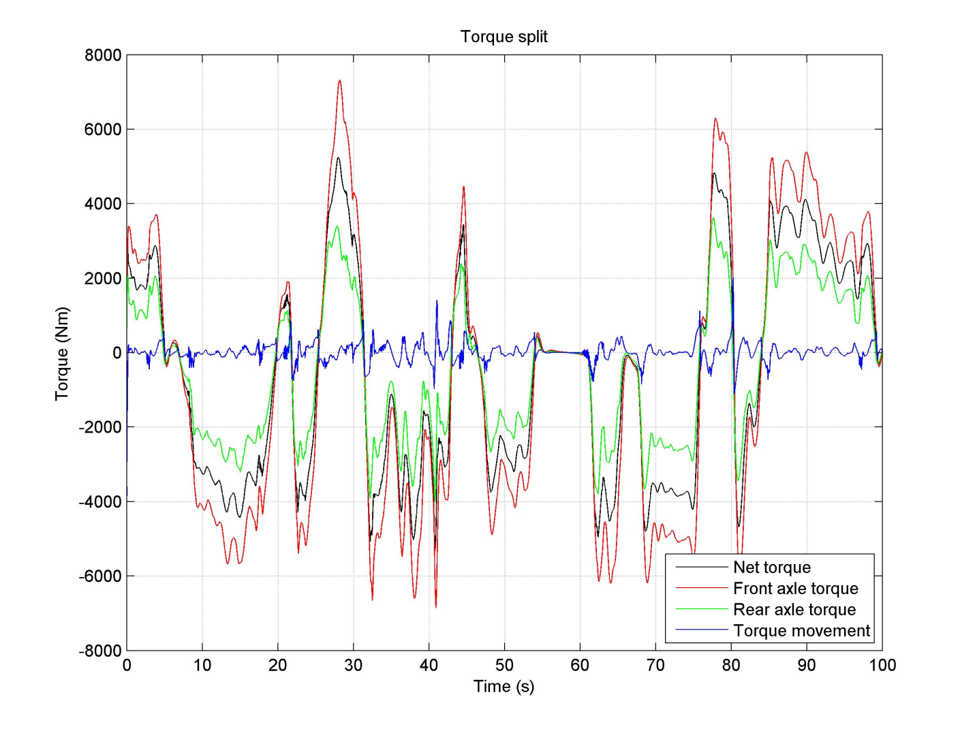
Yaw Rate Distribution
- The total anti torque is distributed between the front and rear axle for optimizing the vehicle balance
Results
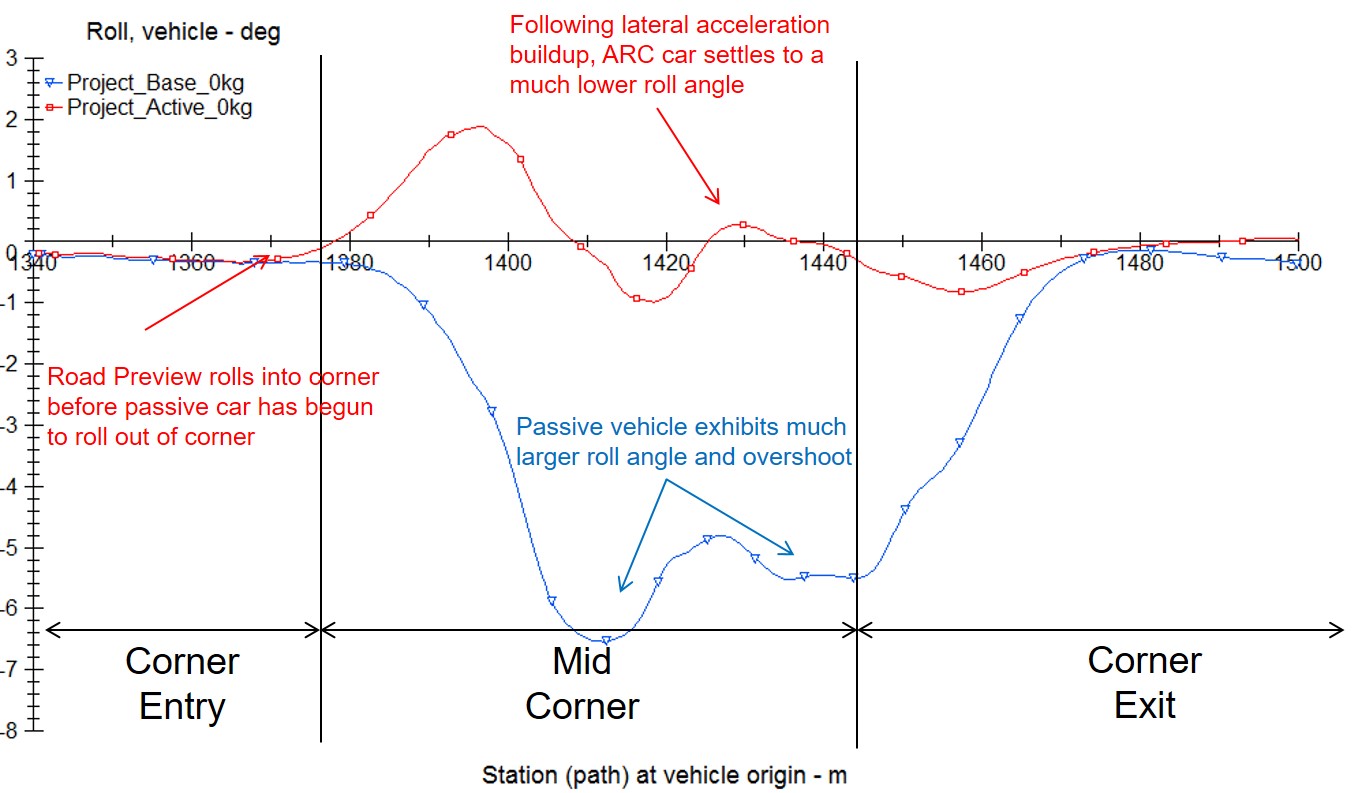


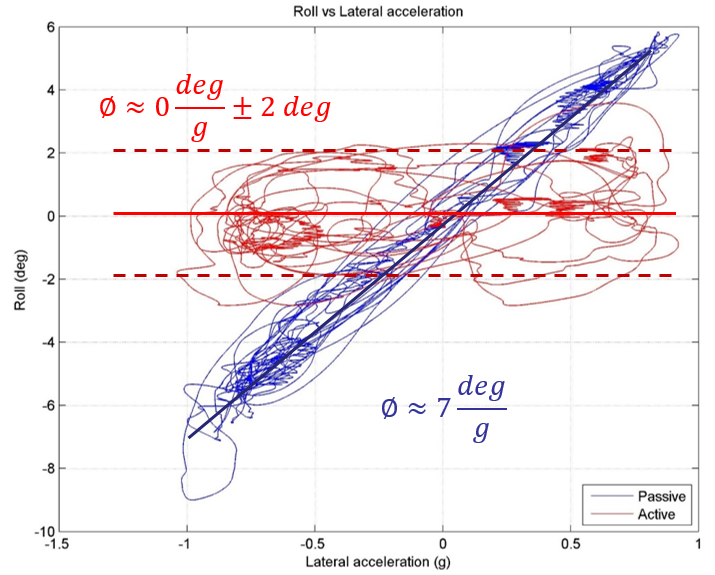
Summary
- Roll rate reduction from passive 7 degrees/g to 2 degrees
- Increased rollover threshold due to reduced roll rate and lateral CG movement
- Performance gain of 0.25 seconds over a 2 km handling course due to better chassis balance
Optimization of Vehicle models to reduce the computational requirement
The goal of the project is to optimize the in-vehicle reference bicycle model and understand the computational expense of complicating the bicycle model
- The following parameters were investigated by increasing the complexity of a simple linear bicycle model
- Tire force saturation
- Lateral load transfer based on lateral acceleration
- Longitudinal load transfer based on longitudinal acceleration
- Roll dynamics using roll angle of the vehicle
- All the above models with lookup tables for tire forces
- The largest improvement was achieved with the addition of tire force saturation
- The assumption was that the addition of subsequent parameters would improve the correlation during the dynamic response stage, but the model did not provide much improvement over the tire force saturated bicycle model
- It was determined that the model can be further improved with the addition of parameters like CG movement due to vehicle loading
Computational expense study for monte-carlo simulations
- Using Parallel computing toolbox in Matlab yielded a scalable solution
- The limitation being the number of available computing threads. An approximate 5x improvement was observed with 8 computing threads (bicycle model).
Powertrain Concept for year 2020
Conceptualize powertrain specifications for the year 2020 Nissan Altima
The targets were set based on current vehicle specifications with influence from HDS-092013-Future-US-Trends-in-Adoption-of-LD-Auto-Technologies
Targets
| Parameter | Value |
|---|---|
| Combined Fuel Economy | 36 mpg |
| 0-100 kph | 7.8 to 7.6 s |
| Curb weight | 3000 to 3200 lbs |
| Transmission ratio spread | 7 |
Key target attributes
- Powertrain
- Good power and pickup
- Above average fuel economy
- Consider downsizing and turbocharging
- Vehicle sales
- Target 13.5% market share
- Transmission
- Program Mix: 100% CVT
- Add start/stop
- Vehicle cost
- Target price: Competitive
- Profit Margin: 8%
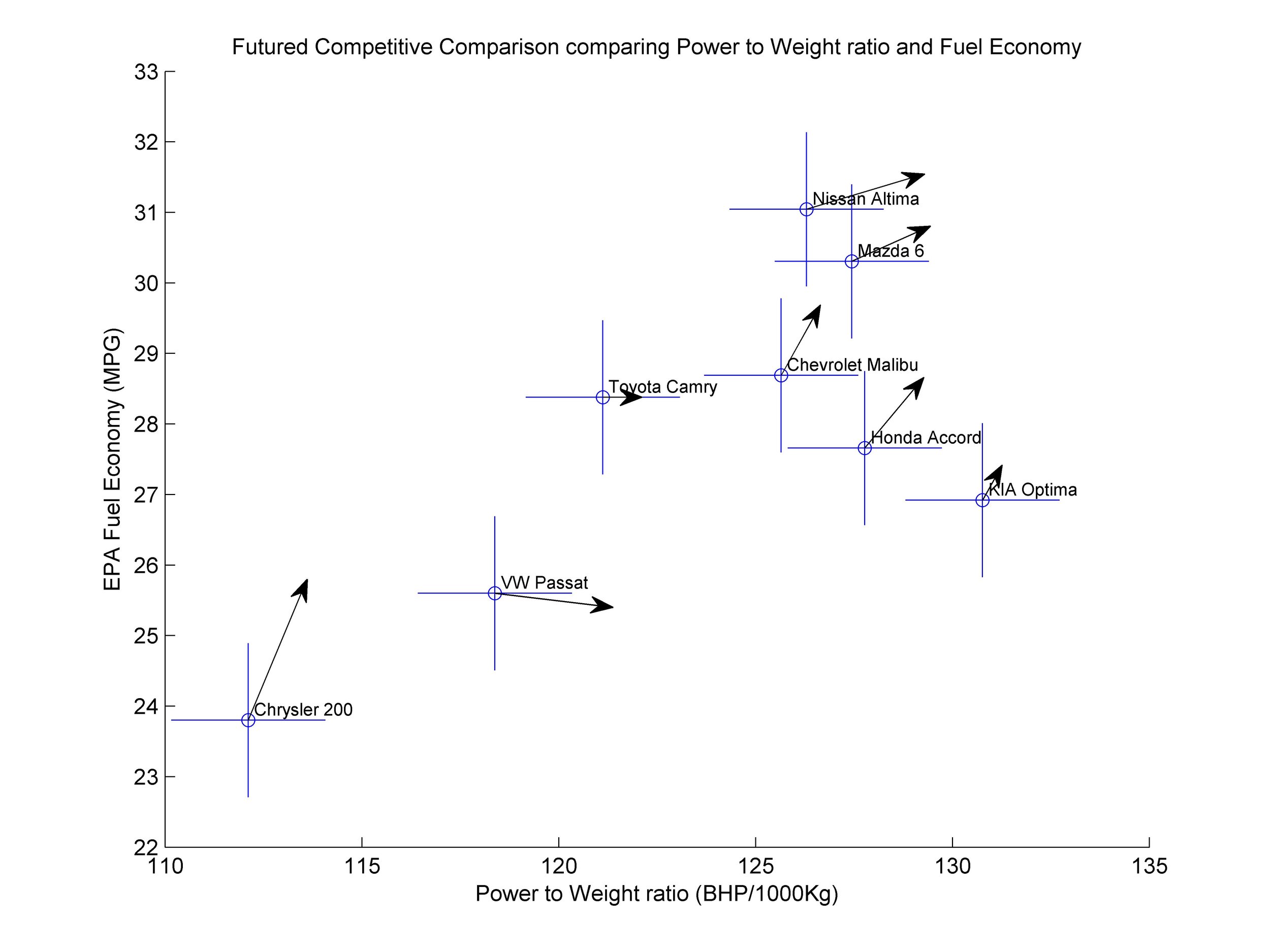
Competitors 2020
Based on the available technologies, we expect the following trend from the competitors.


Modelling
- Engine maps were generated in GT Power
- The driver model was executed in Simulink
- Vehicle model was setup in Carsim and run as co-simulation
Tradeoff study
The results from various technologies were considered for Tradeoff study
| Model version | 0-60mph time (sec) | MPG (HWFET) | MPG (city) | RPE ($) | Rank |
|---|---|---|---|---|---|
| Base | 8.613 | 38.45 | 30.77 | - | 7 |
| High CR | 8.446 | 39.56 | 31.4 | - | 6 |
| DI | 11.628 | 39.37 | 32.1 | 230 | 8 |
| Low Friction | 8.568 | 41.64 | 33.1 | 170 | 5 |
| Supercharged | 7.278 | 40.5 | 33.27 | -80 | 1 |
| VVT | 8.507 | 40.38 | 32.47 | 290 | 4 |
| Light Weight | 7.856 | 39.75 | 32.97 | 30 | 2 |
| Xtronic | 7.964 | 40.88 | 32.78 | 125 | 3 |
Supercharging and Light Weighting were implemented based on cost and improvement
Results
The results are better than the targets due to a number of assumptions in modelling.
- The engine map created from GT power is not an exact replica of the Nissan Altima 2014
- The engine was not co-simulated but was used as a look up table for the base model
- All the technologies have been developed individually (to check sensitivity), but for a real case they need to all work together
- The improvements in fuel economy due to friction reduction techniques had too much overlap, hence there is a large difference in the simulated and proposed value
- We have modeled a turbo charger instead of a supercharger and accounted for the supercharger parasitic losses
- 30% losses was considered for the supercharger model
Health Chart
| Target | Status | Toyota Camry | |
|---|---|---|---|
| City fuel economy, mpg | 33 | 37.9 | 28 |
| Highway fuel economy, mpg | 40.5 | 44.2 | 39 |
| Combined fuel economy, mpg | 36 | 40 | 32 |
| Engine Peak Power | 180 HP | 198 HP | 178 HP |
| Engine Peak Torque | 190 Nm | 236 Nm | 170 Nm |
| Maximum Engine Speed | 6000 rpm | 6000 rpm | 6000 rpm |
| Torque Converter k-Factor | 200 | 200 | n/a |
| Transmission Ratio Spread | 7 | 7 | 5.427 |
| Final Drive Ratio | 4 | 4 | 3.634 |
| N/V (rpm/mph) | 35 | 38.327 | - |
| Vehicle curb weight (lbs) | 3000 | 2784 | 3240 |
Android OBD gaming and NFC smart key
Seamless connectivity is a key requirement in society today. We tried to tackle two items in this project. One is about providing automotive users with seamless access to the car replacing the car keys with smart phones. The second part of the project is creating a social gaming experience where the driver competes with his driving skills.
Secure unlock using Host Card Emulation
Key Features
- Communication protocol is similar to current Mobile payment systems in terms of usability and security
- The technology was demoed using an Android device securely communicating with a generic NFC reader
- This technology can be used as a quick and secure way to unlock cars
- A useful tool for car sharing programs
Shortfalls
- Due to current os limitations, this feature cannot implemented on ios
- No fallback option if the phone battery is dead
OBD Social gaming
Key Features
- Integration of vehicle Telemetry and multiplayer social gaming
- This is achieved by connecting a OBD-II dongle and transmitting data to the mobile device
- The technology was demoed using an android phone communicating with an ELM327 adapter over Bluetooth
- The social gaming aspect was powered by Google Play Games and can easily be ported to support ios Game Center